

AGV(自动巡航车)
磁环编码器应用案例

在智能时代不断进步的今天,AGV作为物流、仓储、自动化、新零售、户外运输的应用越来越多。
在生产生活更加智能的同时,对AGV小车的动力控制性能、稳定性要求也逐日上升,更高精度的控制算法成为AGV中必不可少的一部分,而只有在更高精度的运动反馈下,才将高精度控制的实现成为可能。

传统方案
如右图所示,传统的霍尔控制方案将3个开关霍尔插于电机定子槽内,用来感知转子上磁瓦的N、S极切换,从而产生运动波形,为控制器提供位置反馈。
优点
- 而为了得到绝对角度数据,则需改进编码器原理,主要有以下方法:
- 成本低:3个开关霍尔与简单的PCB组成的电路模块
- 控制简单:直接用开关霍尔的信号来控制线圈磁链的开关,且控制器价格低廉
缺点
- 精度低:每一圈最多产生N个脉冲(N为电机磁瓦极对数,一般数值为两位数),无法实现高精度的角度反馈
- 一定损坏率:由于霍尔位于电机定槽内,过于靠近发热源(线圈),霍尔存在一定可能性损坏。且由于运行时温度过高,该区域电路无法做胶性密封处理,发生进水故障时则会直接短路烧毁
- 启动性能不佳:由于磁钢之间存在一定角度的间隔,当由零速起动时,则会存在不同程度的小抖动
而为了得到绝对角度数据,则需改进编码器原理,主要有以下方法:
场景分析
AGV拥有自主行走的能力,且控制较为复杂,但性能、效果更佳,直接使用传统的控制方案在很多应用场景应用下是不行的,需要更优的控制算法以及高精度的反馈系统才能完成大部分的场景需求。如以下应用场景:
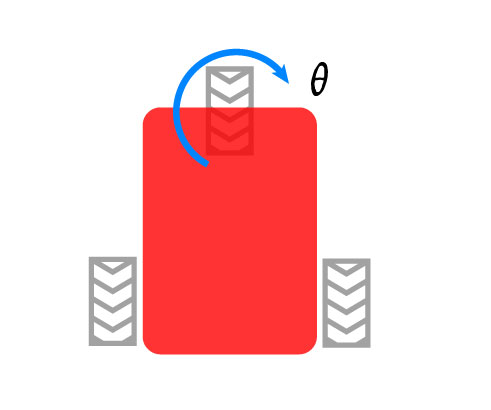 |
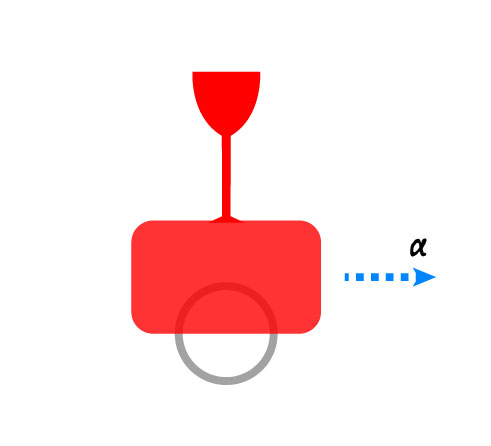
单驱动,该结构一般拥有一个动力驱动(于前轮或后轮),转向时,则需要精确控制转向轮偏转角度 |
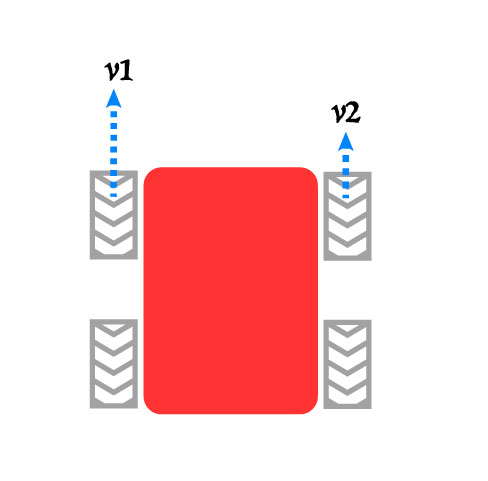 |
双驱动,该结构一般拥有两个动力驱动,转向时,需要精确控制两个轮的转动速度达到差速转向 |
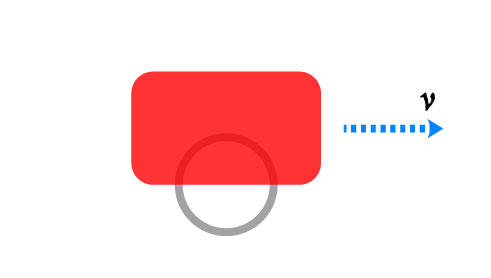 |
定速巡航时对速度的精确控制 |
 |
加减速时对速度变化曲线的控制,才会得到更优的速度变化,得到更加平衡的运动状态切换 |
 |
双驱动,该结构一般拥有两个动力驱动,转向时,需要精确控制两个轮的转动速度达到差速转向 |
金钢科技作为专业的磁编码器定制商,为AGV的高精度反馈需求提供最优秀的方案与支持。我们的高精度磁环编码器拥有良多优秀的性能,应用场景广泛分布于电机控制领域,并且拥有更优的成本控制,且定制化程度高,可以为客户适配所有不同的驱动器接口。
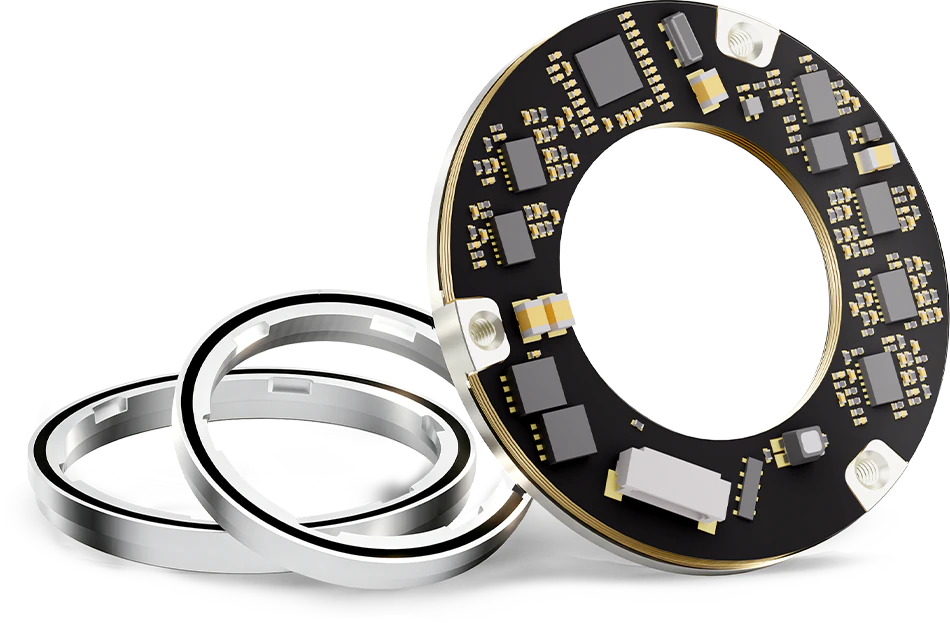
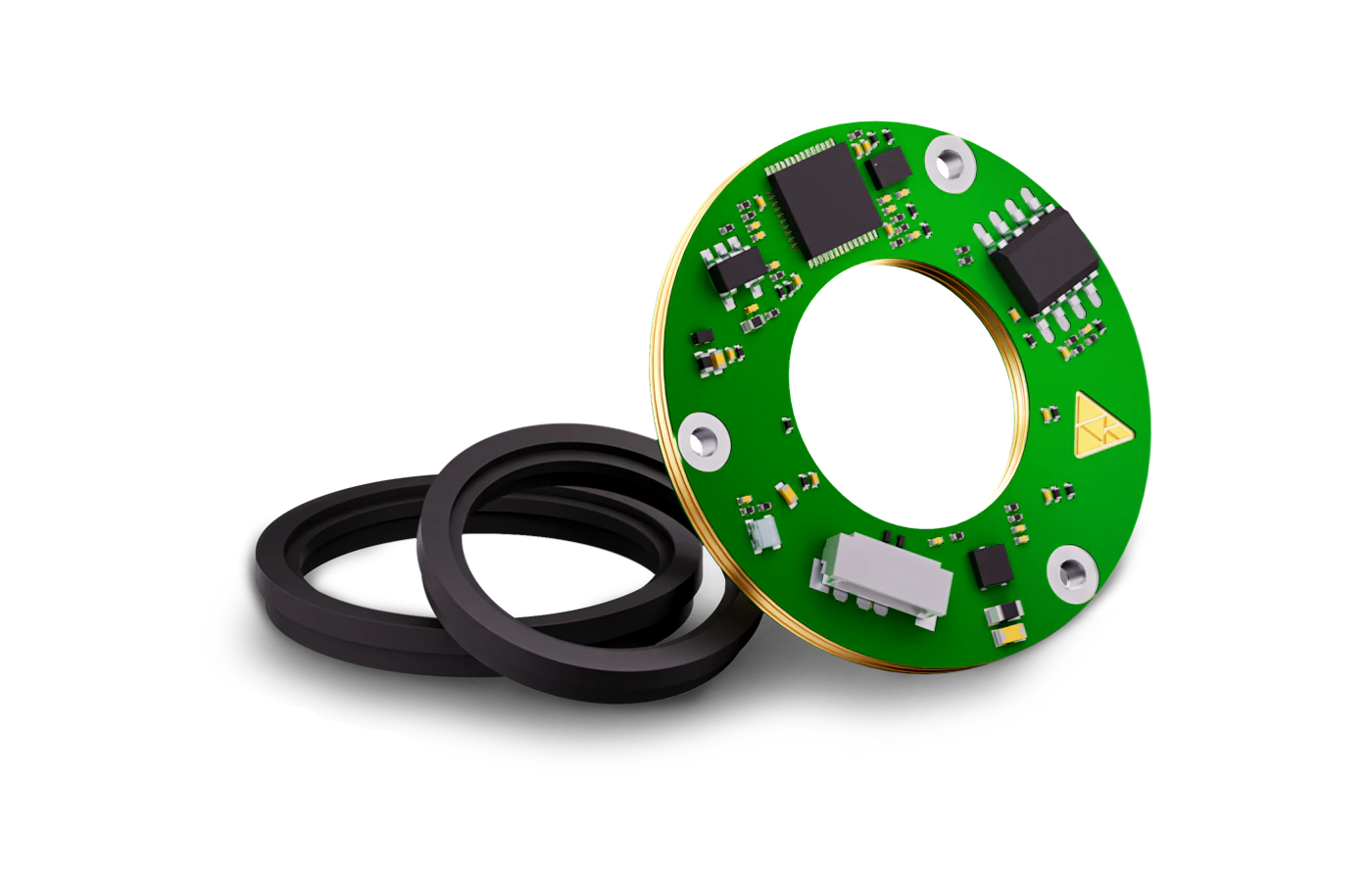
磁环编码器
磁环编码器由编码器本体、磁环组成,通过本体内的芯片无接触式地检测磁环旋转产生磁场,来测量当前的位置并从根据客户需求的接口格式输出,如下图则为轮毂内测安装方式的示意图:
编码器本体,固定于定子轴上

编码器磁环,固定于转子端盖上
编码器安装在轴心位置,远离发热源,可以做到完全防水,损坏率更一步降低。
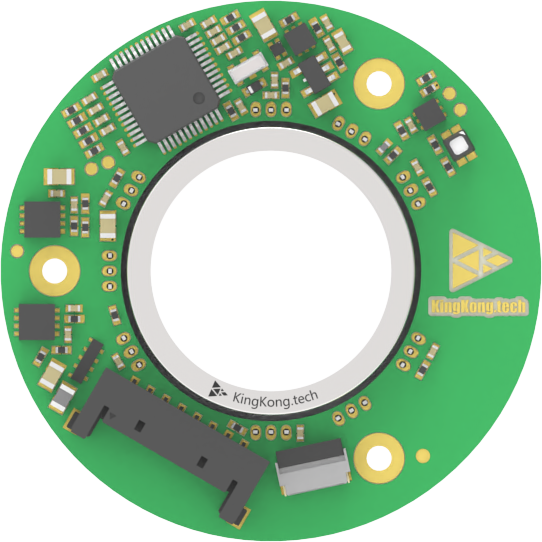
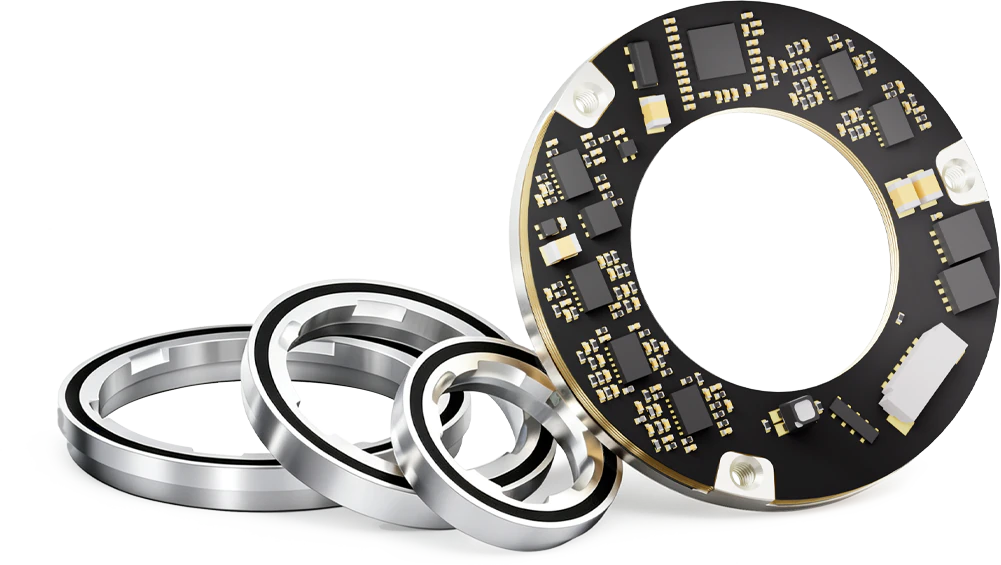
磁环编码器内部电路
(不同版本均不同)
磁环编码器内部拥有三对极磁敏元件,用来测量磁环磁场的变化,并经过数据处理解决了温度漂移、谐波干扰等问题,特有的对称结构布局使得可以一定程度抵消掉安装带来的偏心误差,降低装配工艺要求。
特点
- 环形结构:使得其可以安装在AGV电机的轴上或轴端
- 高精度、多种接口输出,其可以拥有以下接口,且可以同时配置多个不同接口:
- 16位绝对值型:一圈内的绝对位置,将360˚对应到0~65535,通过总线传输
- 64~5000线增量型:一圈内发N个脉冲,将360˚分为N*4份,通过脉冲传输
- 正余弦型:模拟量输出当前角度的信息
- 霍尔型:根据极对数来配置霍尔脉冲的个数,与常规三相霍尔输出一致
- 高转速:最高可以测量20000rpm
- 抗油污、灰尘:可在恶劣环境下工作
- 抗振动:可以承受相当大的轴向振动,一定程度的切向抖动
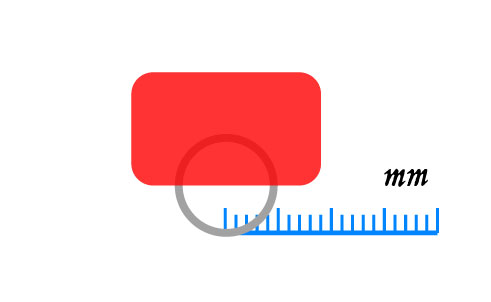
- 尺寸小:最小厚度8mm,可以轻松嵌入各种产品结构中
- 损坏率低:如AGV应用中,工作在远离发热源位置,且可以做到防水保护
- 成本低:磁环编码器在高精度同类型产品中,拥有更优的成本控制
*大部分AGV使用增量型、增量型+霍尔型、绝对值型、绝对值+霍尔型
该编码器的高精度输出足以满足AGV高要求的位置控制,并可以提供更强的鲁棒性,为产品带来更佳、优秀的体验。
特点
您可以根据您的产品设计、工作环境以及精度要求来选择适合的方案,如编码器的线数,输出接口,内外径尺寸,抗振动程度,抗外界冲击能力等,以获得更优的成本控制方案。
金钢科技作为专业磁编码器定制商,当您对上述方案有疑问时,欢迎联系我们咨询,我们可以为您提供优秀的技术支持与方案选择,加速产品的研发,并可以提供快速打样,缩短产品的研发周期。
欢迎联系我们免费申请样品。