2019/02/19
协作机器人
双编码器执行器案例
在人机协同愈演愈烈的今天,我们对机器人的要求也是上升了一个维度,传统的五大笨粗机器人,如码垛、搬运、焊接等大型机器人只能在安全防护栏内工作,是无法出现在我们工作台上的。
而协作机器人凭借其轻巧、安全、方便的优势,在轻工业中为我们带来了更多的自动化劳力,其对精细物品操作更加敏捷,更适合与人进行协作办公。为了与人协作的各项标准,我们对协作机器人从精度、体积、安全等各个方面,都提出了更高的要求。
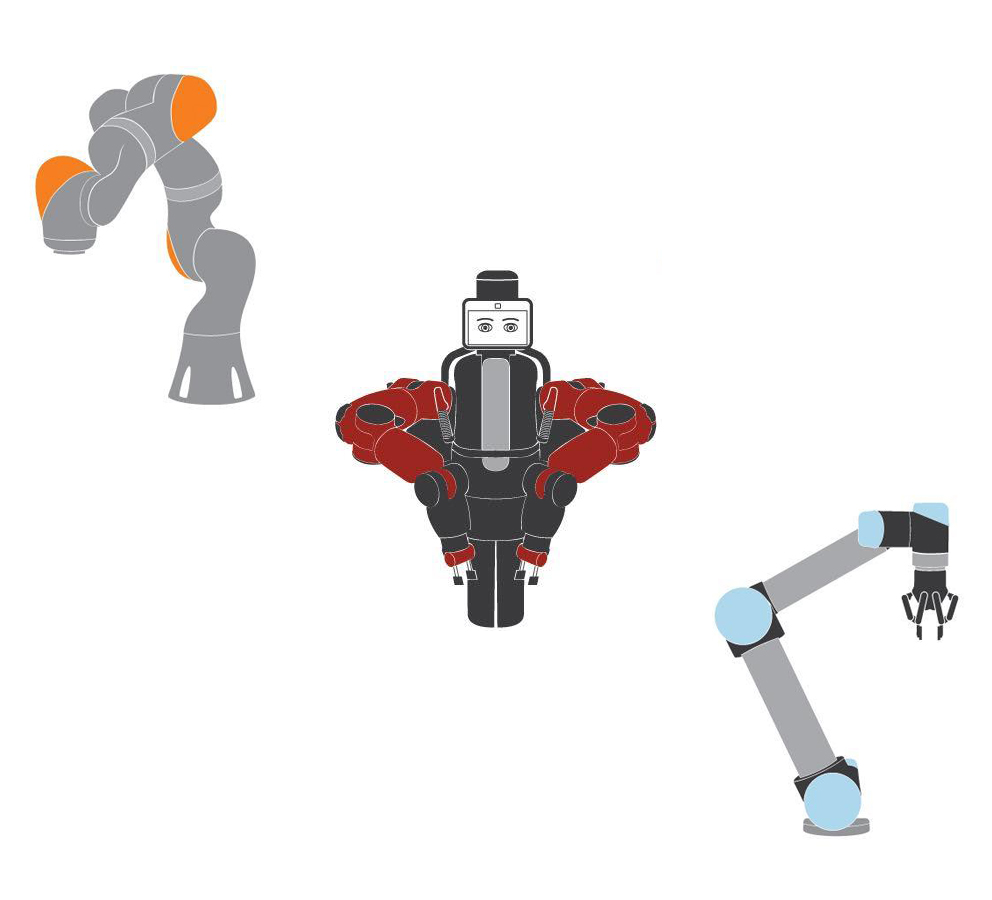
执行器
对于机器人来说,其每一个关节的动作,都离不开电机、减速机、编码器、驱动器,对于传统大型机器人中,对机器人的空间要求不高,所以在节省成本的情况下,传统机器人基本上是由很多个上述不同作用的模块直接拼接起来的。
而对于协同工作的机器人来说,其对空间要求极高,使得我们不得不将所有的功能模块进行集合,得到集成度更高的模块化执行器,并安装于各个关节处,得到最紧凑的空间布局,同时有利于生产与维修,才能在价格上更具优势。
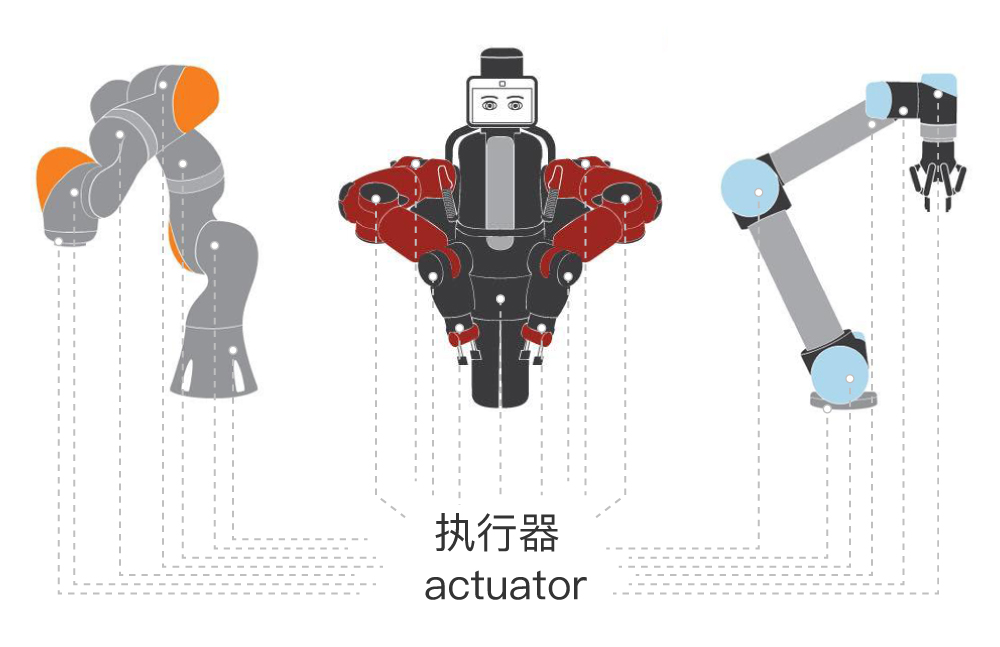
如上图所示,所有的机器人的动作关节都安装有集成化的执行器,来完成来自于总控单元的动作命令,除了提供足够的扭矩之外,协作机器人对以下几点拥有更高的要求:
- 高精度:协作机器人的动作精度,取决于每个执行器的精度,在拥有最佳精度机械零件的基础上,每个执行器的控制精度都必须依赖于编码器对动作的精确位置反馈,才能得到机器人整体的高精度动作
- 安全性:协作机器人必须拥有对外部力的感知能力,就像我们蒙着眼睛摸路,当胳膊感知到障碍物时,必须停止动作,即为机器人的碰撞安全检测奠定基础
- 易用性:协作机器人不能像传统机器人一样拥有复杂的操作流程(传统机器人拥有专用操作职业),其必须拥有较佳的操作性,弱化对专业操作的需求,才能与不同的人、不同种类的工作更好地协作。再次假设我们蒙着眼睛,且被另一个人拖着胳膊走,我们通过感知到胳膊上的受力方向从而跟着走,对于机器人来说,即拖动示教,方便人们的使用
对于安全性和易用性,需要机器人对本体受外部力的感知能力,而对于每一个关节来说,则是对外部扭矩的感知能力,更好的扭矩感知能力则可以感知更小的外部扭矩,得到最佳的性能反馈。
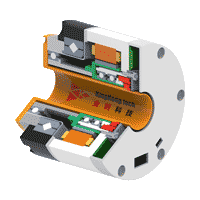
本文主要针对该执行器方案进行描述,上图为方案的案例示意图,具体细节请见下文。
扭矩感知方案
- 对于扭矩感知,现有以下方案:
- 电流:通过电机线圈的电流估算外力,方便但精度低
- 双编码器:加装高分辨率编码器以测量输出端位置变化计算扭矩,费用低,精度高
- 扭矩传感器:在输出端加装扭矩传感器测量,费用高,算法难度高
- 应变片:在谐波柔轮上装贴多组应变片以测量扭矩,结构极其复杂,标定难度高
双编码器问题
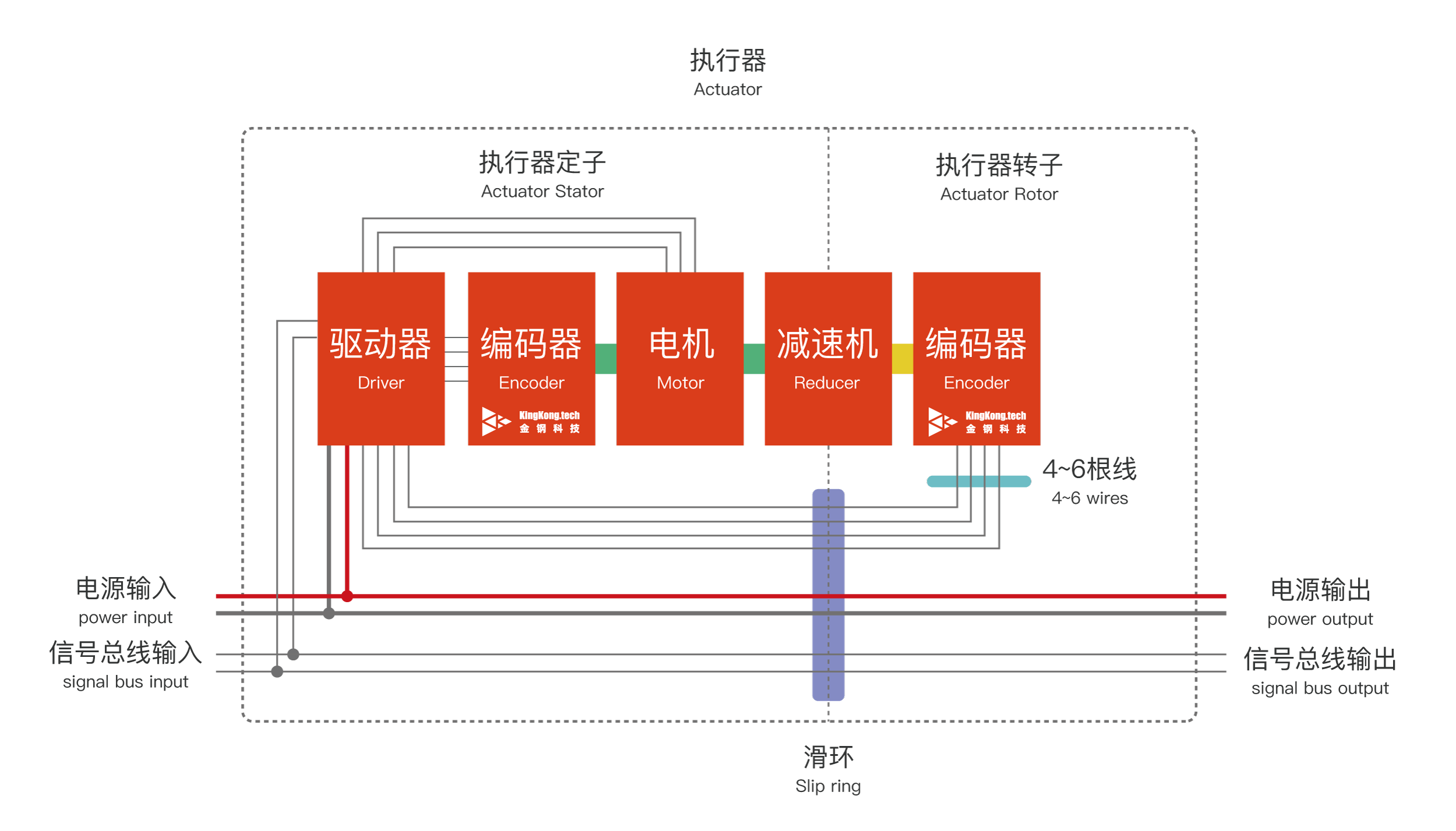
提起双编码器,那既然是在输出端加装一个编码器,如上图所示,那么对于输出侧的编码器,这样的设计会带来哪些棘手的问题使得方案变得不可行或难以实现呢?有以下几点:
- 编码器与输出法兰的位置:要使用编码器来测量执行器转子的变化,则编码器的定子必须固定于执行器的定子上,导致编码器必须安装在输出法兰靠近执行器定子一侧,带来的是结构复杂,输出轴长度增长使得弯距增加,结构稳定性相对较差
- 编码器的走线:由于编码器在执行器转子侧,所以其供电、通信线路必须由滑环提供至另一侧,增加了滑环的路数、尺寸,使得设计冗余
双编码器
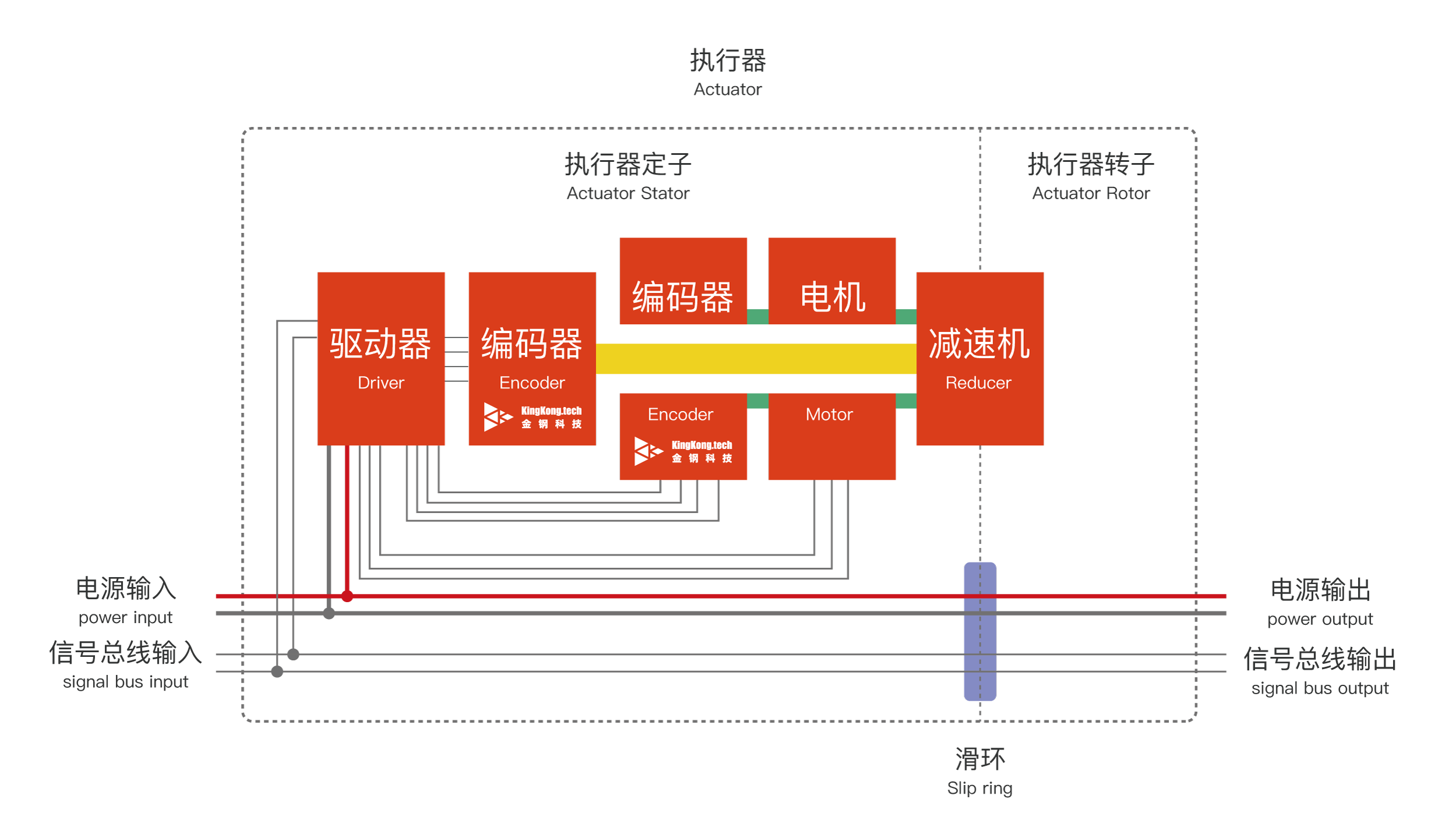
为了解决上面的问题,现在市面上较优的方案如上拓扑图所示,通过中空轴设计,将输出轴侧的编码器转移至执行器定子侧,而输出轴反向多一个穿过中空轴的回路轴,为编码器提供转动数据,同时解决了编码器定子的固定与走线问题。
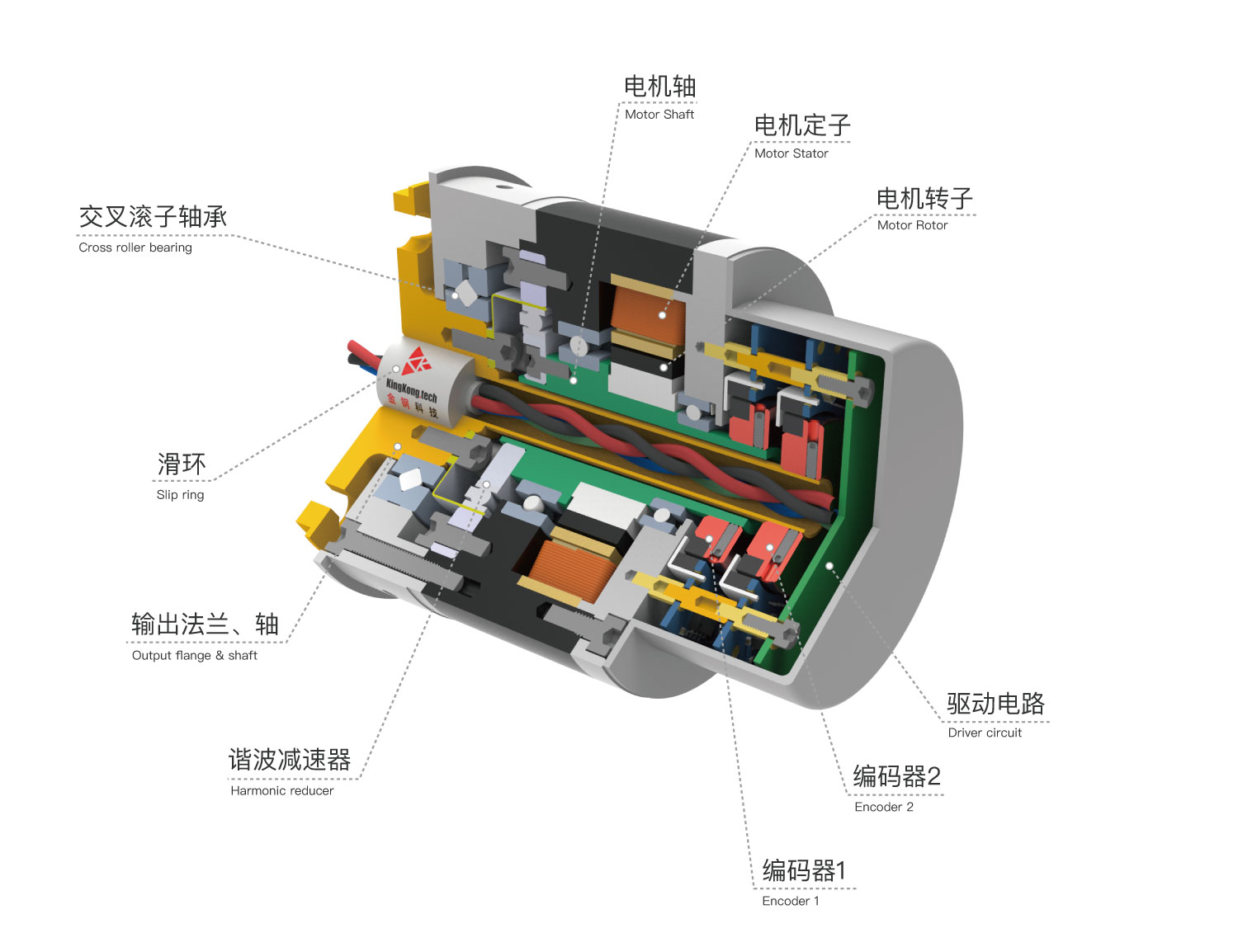
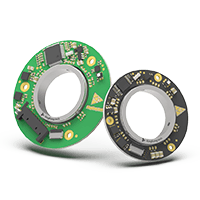
上图为该方案的结构图,编码器1用来驱动电机,编码器2用来测量输出位置的变化。
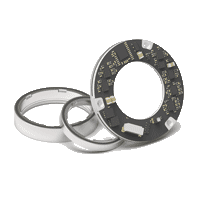
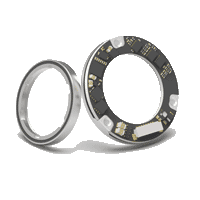
图中使用的是金钢科技PCB系列磁编码器,为测量带来足够的分辨率和精度保证,同时超薄的编码器为设计提供了极紧凑的结构,两个编码器在轴向上仅占有15mm左右的空间。
双编码器算法
该方案中一般使用的谐波减速比为几十至100左右的大速比
- 静态时:当输出侧受到外部扭矩,输出侧编码器2会测量到微小变化,而在大的减速比下,此时电机侧编码器1还未发现变化。通过比照则可得到人手在机械臂上的微小用力,从而反馈给驱动器,若用户打开了拖动示教则开始调节电机跟随受力,或没有,则转动电机补偿外部受力以保持输出位置恒定
- 动态时:在得到电机侧编码器1的数据后,可根据计算得到输出轴的理论位置,然后与输出侧编码器2的数据进行对比,得到外部受力大小,从而交付驱动器进行后续控制
其优点在于动态时,相比电流、扭矩传感器、应变片等都是基于时间维度的变化量测量扭矩变化,双编码器则完全使用了基于空间维度的参照进行测量。由于机械臂一般臂展长,动态时重心、动量在不停变化,即前者测得的数据一直都是在波动变化的,而要在基于时间的波动变化曲线上找出曲线上的增减量来判断外力的大小,其精度远不比使用空间上比较得到的值更为精确。
在使用双编码器方案时,一般是使用双编码器的空间维度测量与电流的时间维度测量结合来得到更优秀的输出数据。
未来
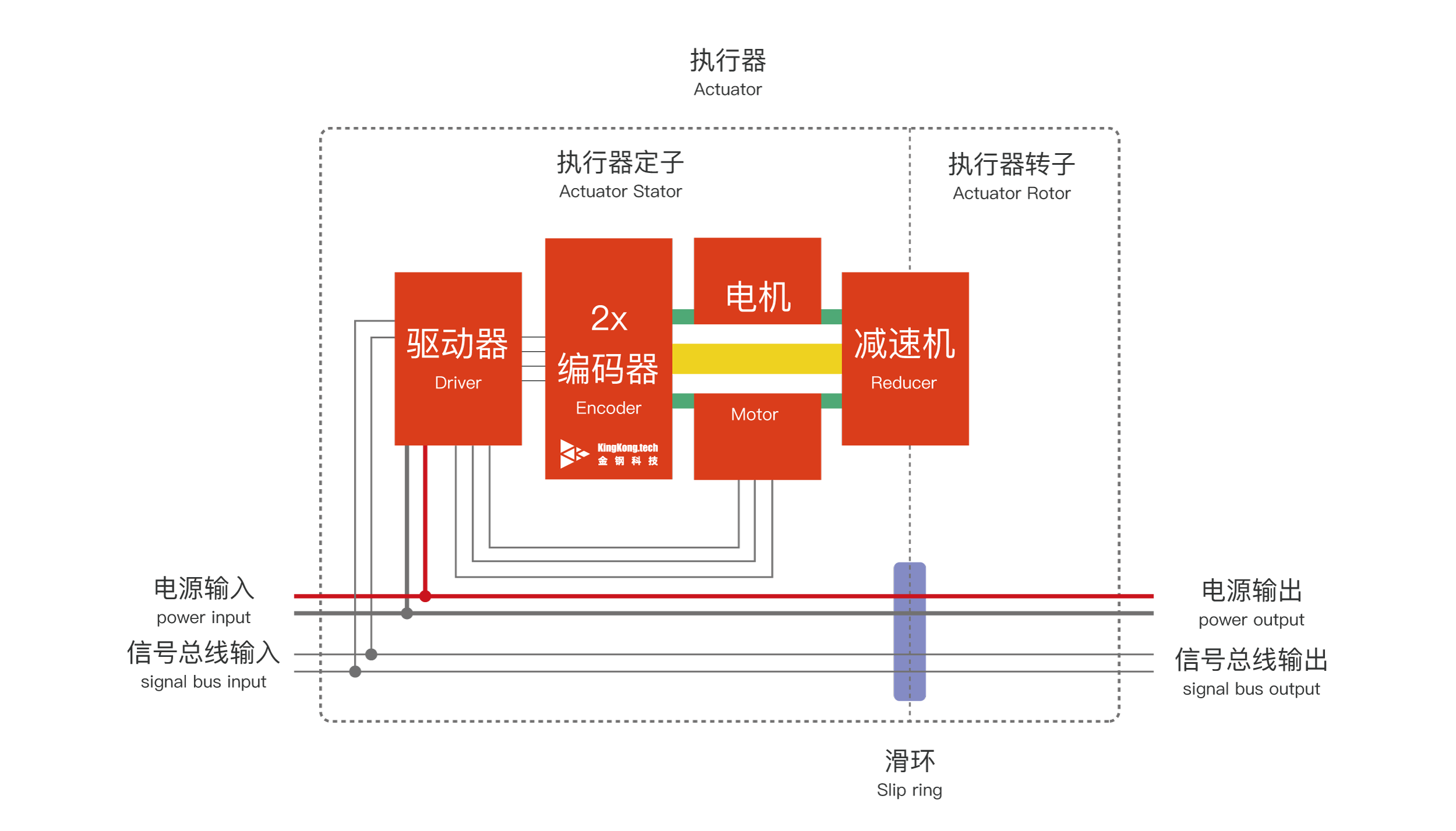
金钢科技致力为您提供更优秀的方案,我们的在申专利产品如上拓扑图中所示,可为您提供更紧凑的空间(高约10mm左右)、走线、控制方案,它将会在不久的未来发布,您也可以联系我们获取最新消息。
上述为协作机器人中的双编码器执行器案例,如果您有任何问题或需要帮助,欢迎联系我们。