2026/06/17
The First Robotics Intelligent Perception Summit Concludes Successfully, Opening a New Era for Robot Perception
On June 16, 2026, the inaugural 2026 Robotics Intelligent Perception Summit was held in Changping District, Beijing. The summit was jointly hosted by KingKong Technology and Chang Development, bringing together more than 150 participants from the perception industry, including AI companies, research institutes, universities, industry associations, and investment institutions.
Liu Xiaodong, Deputy Secretary of the Changping District Committee, District Mayor, Deputy Secretary of the Party Working Committee of Future Science City, and Director of its Administrative Committee, attended the summit and delivered a speech. Liu Guangyi, Chief Expert of China Mobile Group, and Liang Hongjun, Deputy Director of the Intelligent Manufacturing and Equipment Industry Division of the Beijing Municipal Bureau of Economy and Information Technology, also attended.

With “perception” as its entry point, the summit focused on perception fusion and the joint development of data standards. It systematically brought together leading companies and ecosystem resources across the full robot perception track for the first time, covering key topics such as vision, touch, position sensing, LiDAR, IMU, electronic skin, and other perception technologies. The summit aimed to build industry consensus, unify standards, and strengthen the perception foundation for large-scale embodied intelligence deployment.

Solving the Challenges of Large-Scale Robot Deployment
Intelligent perception is widely regarded as the core foundation for autonomous robot operation, intelligent interaction, and safe task execution. Today, humanoid robots and embodied intelligence are on the eve of explosive growth, but the industry still faces three major challenges:
· Fragmented standards — perception data from different manufacturers and modalities is difficult to interconnect, limiting generalization in embodied model training and deployment;
· Inconsistent interfaces — software and hardware adaptation costs remain high, forcing robot manufacturers to repeatedly write “glue code”;
· Difficult multimodal fusion deployment — the “last mile” of perception remains unresolved, becoming a core obstacle to bringing robots into everyday life.
Against this background, industry experts and leading companies shared macro-level insights and advanced industrial practices, while engaging in in-depth discussions on perception fusion, standard co-development, and related topics.

In recent years, China’s robotics industry has made major progress in core component breakthroughs, supply chain development, and scenario expansion, becoming a global source of robotics innovation. Liang Xuexiu, General Manager of the Artificial Intelligence Research and Evaluation Division of China Software Testing Center and Secretary-General of the Beijing Robotics Industry Association, noted that during the 15th Five-Year Plan period, China should strive to bring the overall strength of its robotics industry to an internationally leading level. Perception interaction is the top priority among core technology breakthroughs and is closely tied to safety standard development. He also noted that the testing center has worked with Tsinghua University, Fudan University, and other institutions to release China’s first systematic embodied intelligence evaluation benchmark, ET-Benchmark, and completed its first large-scale application validation at the 2025 World Humanoid Robot Games.

Ding Lishi, Director of Public Affairs at PaXini Tech, introduced PaXini as an infrastructure builder for the embodied intelligence era. The company focuses on Hall-effect multidimensional sensing technology and provides global partners with high-precision tactile sensors and integrated embodied perception solutions. With deep expertise in force-tactile sensing, the company has overcome key bottlenecks in high-end sensor technologies in China and enabled tactile sensors to move from “import dependence” to “global leadership.” PaXini has now built a full-stack embodied perception product and solution system combining full-chain perception hardware, full-modal data acquisition, and the OmniVTLA embodied model, comprehensively empowering rapid industry development.
As embodied intelligent robots accelerate toward mass production, demand for MEMS inertial sensors continues to rise, along with higher requirements for device reliability and safety. Zhang Longhai, Product Director of Anhui Xindong Lianke Microsystems Co., Ltd., said that after multiple rounds of technology iteration, the company has independently developed high-performance MEMS gyroscopes, MEMS accelerometers, six-axis MEMS inertial measurement units, and other product series. These products combine miniaturization, high performance, and reliability, and are widely applicable to intelligent driving, humanoid robots, and other scenarios, where they can stably output attitude data under complex conditions and build an indispensable “full-domain attitude perception benchmark” for intelligent equipment.
Facing the data bottleneck of “extreme scarcity of real interaction data” in embodied intelligence, Li Jianhui, Deputy General Manager of Marketing at Beijing YuanKe Vision Technology Co., Ltd., proposed that industry competition is shifting from hardware to models and data. Technical routes are evolving from traditional VLA to WAM, while data acquisition is shifting from real-machine teleoperation to a human-centered paradigm based on human motion and first-person video without robot embodiment. YuanKe Vision has built a new large/small-brain separated training system with a world model, using human motion data acquisition as the core to replace costly real-machine teleoperation while balancing data quality, acquisition efficiency, and cost. Relying on optical-inertial motion capture, multi-view stereo video, VGGT, 4DGS, and other technologies, the company completes 3D scene reconstruction, photorealistic simulation rendering, and multimodal mechanics data acquisition, opening a closed loop of real-world acquisition → simulation training → real-machine deployment to solve Sim2Real transfer and generalization challenges.

Cai Weidong, Ecosystem Lead at RoboSense, shared that LiDAR is accelerating its expansion from ADAS autonomous driving into robotics. The company has released its self-developed “Phoenix” chip, an automotive-grade SPAD-SoC with more than one thousand lines, and the “Peacock” chip, the world’s highest-resolution ultra-large-area SPAD-SoC. Beyond the automotive market, RoboSense aims to provide standardized “robot eyes” for the trillion-level robotics market and catalyze new forms of super sensors. As the Phoenix and Peacock chips gradually reach mass production, RoboSense is turning its technology leadership into a chip-level generational moat, raising product performance limits while optimizing costs, promoting LiDAR from a high-end option to a standard configuration across vehicles, robots, industry, and consumer electronics, and further accelerating true large-scale humanoid robot production.

Jia Yifan, Head of Corporate Development at Maxic Technology, said the company has built a chip matrix spanning “sensing, driving, and power supply.” Based on its existing optical sensing, magnetic sensing, driving, and power supply chips, and relying on chip-level multimodal fusion technology, its 4D AI Sensor integrates RGB images, ToF depth information, and DVS dynamic vision information to achieve high-frame-rate output. The company is committed to improving perception performance at the chip level while reducing robot BOM costs and development complexity.

During the summit’s roundtable discussion, several industry representatives exchanged views around “robot perception fusion and data standard co-development.” The guests noted that only by aggregating and processing multisource data into standardized outputs can the central computing unit be relieved and large-scale robot deployment be accelerated. Participating companies jointly called for the establishment of software-hardware decoupling and adaptation standards, as a more open and collaborative perception ecosystem continues to take shape.
KingKong Technology’s Triple-Encoder Solution Defines the Robot’s “Gentle Core”
Liang Zheng, founder and CEO of KingKong Technology, shared the company’s ten-year journey of perception evolution: from a one-person company in a 30-square-meter space in Changping in 2016, to a team of 300 people and over 10,000 square meters today; from door-to-door sales with little recognition, to becoming the market-share leader in robot encoders. KingKong Technology now delivers 5,000 encoder sets per day and expects to exceed 2 million sets in 2026, supporting 80,000 to 100,000 humanoid robots.

The large-scale deployment of embodied intelligence places unprecedented demands on robot joint sensing accuracy, force-control capability, and integration. Traditional industry solutions are large, difficult to wire, hard to maintain, and costly. KingKong Technology’s single-encoder and dual-encoder solutions have solved these problems to a great extent. However, as the industry develops and new requirements emerge, single and dual encoders can only feed back a single position signal and cannot meet advanced force-control needs. Meanwhile, the limitation of joints that “measure position but not force” is becoming increasingly prominent in high-precision manipulation scenarios, creating a major bottleneck for improving joint performance.
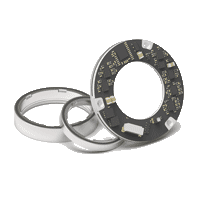
To address this pain point, KingKong Technology officially released its “triple-encoder” joint solution and multidimensional sensing-drive integrated technology products.
The newly released triple-encoder solution achieves a breakthrough in force (torque) sensing on top of position sensing for the first time. KingKong Technology’s patterned magnetic technology enables high-precision, high-resolution measurement, sensing internal joint deformation at 0.0001° resolution. It can “sense deformation when twisting a steel pipe just like sensing deformation when wringing a towel,” enabling robots to perform fine operations such as “cutting tofu, carrying plates, folding clothes, and even combing hair.” This leads joint control from the “dual-encoder era” into the “force-sensing stage.”

Multidimensional sensing-drive integration deeply integrates sensing and drive functions, eliminating modular data islands. Previously, position, force, current, temperature, and other data operated separately; sensing-drive integration fuses all sensing data to support smarter decisions. The products provide two options, s3Driver (triple-encoder sensing-drive integration) and s2Driver (dual-encoder sensing-drive integration), enabling multiple cost choices and providing key support for humanoid robots evolving toward lighter weight, higher flexibility, and greater safety.
This breakthrough is not only epoch-making for humanoid robot manufacturers as they move beyond industrial assembly thinking and build embodied-intelligence-native systems; it will also help lower the intelligence threshold for downstream scenarios such as semiconductor production, automotive supply chains, precision assembly, rehabilitation medicine, and surgical assistance.
Building a Perception Ecosystem Together to Bring Embodied Intelligence into Every Industry
The significance of the inaugural Robotics Intelligent Perception Summit lies in starting from the perception track and calling on industry partners to jointly promote software-hardware decoupling and adaptation standards, collaboratively answering the core question of “how robots perceive the world.” A more open and collaborative perception ecosystem is emerging. As the entire industry chain moves from “working separately” to “building together,” the day when robots truly enter everyday life may arrive sooner than expected.