2026/06/18
Triple Encoder | Robot Joints Achieve Dual Perception of Position and Torque
At the “Perception Evolution, Boundless Future” summit, KingKong Technology officially released its major new product of the year: the triple encoder (joint torque sensing) solution, leading robot joints from the “dual-encoder era” into a “triple-encoder force-sensing era” and bringing a new technical definition to the industry.
Technical Breakthrough: From Position Sensing to Force Sensing
Today, dual-encoder solutions have become the mainstream configuration for robot joints. By separately measuring the rotation angles at the motor end and the reducer end, dual encoders enable closed-loop position control of the joint. However, they cannot sense the force feedback borne by the mechanical structure during interaction with the environment.
The triple-encoder solution was created to break through this limitation. In essence, it is a “super-sensing” joint encoder capable of perceiving external torque at the joint. Among the three magnetic-ring rotors, the middle rotor ring and the inner rotor generate an extremely small torsional displacement when external force is applied. This creates a minute angular difference through the structural deformation bridge. By precisely resolving this angular difference, the system can calculate the torque acting on the joint in real time. The higher the resolution of the angular difference, the stronger the joint’s force-sensing accuracy. High-precision encoders are the prerequisite and foundation for this capability.
How can the triple-encoder solution be understood more intuitively? On top of position sensing, it achieves the first breakthrough into force (torque) sensing, enabling high-precision, high-resolution measurement. With 0.0001° resolution, it senses internal joint deformation with such sensitivity that it can “sense deformation when twisting a steel pipe just like sensing deformation when wringing a towel.” This gives robots the fine-operation capability to “cut tofu and carry plates, fold clothes, and even comb hair,” leading joint control into the force-sensing stage.

Sensing Principle: Based on a High-Precision Torque Angle Difference
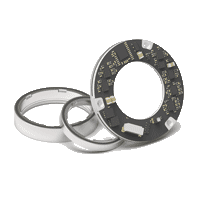
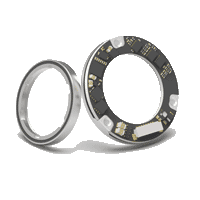
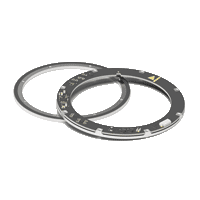
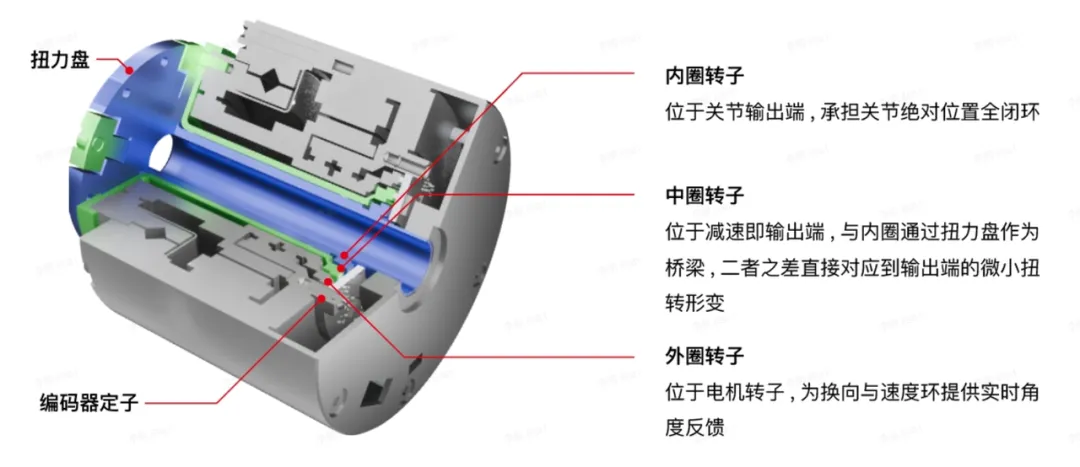
The triple encoder consists of one PCB stator and three rotors. The stator resolves the data from the three rotors and outputs position and torque information. Each rotor has its own role:
· Outer rotor: Located at the output end, it provides full closed-loop feedback for the absolute joint position.
· Middle rotor: Located at the output end and connected to the inner rotor through a deformation bridge. Under load, the angular relationship between the two rotors reflects the force relationship.
· Inner rotor: Located at the output end, it provides real-time angle feedback.
The three rotors share the same PCB stator. This means the three sets of angular signals are physically co-sourced, read at the same time, and calibrated against the same reference. This characteristic is critical to timing consistency in force control and is a natural advantage that external sensor solutions struggle to reproduce.
When the motor output end is unloaded, the inner and middle rotors rotate synchronously in real time. When the motor output end is under force, the deformation bridge design causes relative torsion between the two. An angular difference related to the torque magnitude appears between the inner and middle rings, allowing the system to calculate joint torque in real time and complete the force-sensing closed loop.
Clear Advantages: Compact Size, Near-Zero Added Cost, Strong Performance
1. Zero increase in volume
The triple encoder integrates torque-sensing capability inside the encoder. Compared with traditional solutions that require an additional independent joint torque sensor, it adds zero axial length and also optimizes internal joint wiring. For humanoid and collaborative robots, where joint axial dimensions are highly sensitive and cost control is critical, this advantage means far more than saving space.
2. Lower Overall Cost
The triple encoder fully reuses the encoder position and manufacturing process already required by the joint. In mass production, it is a technical breakthrough with marginal cost approaching zero. The overall cost of torque measurement is significantly lower than adding an independent sensor. As robot mass production accelerates, companies that can keep costs within customers’ acceptable range will build a clear cost barrier, helping them lead the robotics industry and become absolute front-runners.
3. Better performance and stability
To accelerate implementation and reuse mature mass-production experience, the triple encoder continues to use the original communication link and data frame of the dual encoder. The position loop and force loop are naturally synchronized in timing, which is the optimal solution that other approaches cannot achieve. From the rigor of the technical route to the engineering accumulation of the development team and the maturity of the supply chain, the triple encoder’s pursuit of efficient and stable joint control makes it a rare solution with real engineering value in today’s industry.
The Future of Robotics: Perception Evolution, Boundless Future
Force perception is extending from end effectors to joints and even full-body systems. Integrated force-position control is now regarded as a core capability marker for the robotics industry’s next stage. When a robot can obtain both precise position information and real-time joint torque data, complex coupling problems in traditional mechanical transmission systems become easier to solve, making compliant force control possible.
The arrival of the triple encoder comes at exactly the right moment. In the future, as embodied intelligence continues to evolve and scale, demand for compliant robotic operation in precision assembly, medical surgery, home services, and other scenarios will become increasingly urgent. With the triple encoder, KingKong Technology is redefining the new standard for robot joint perception and is committed to providing domestic robotics companies with next-generation flexible joint solutions that are more intelligent and safer.